Trong giải tích toán học, đạo hàm của một hàm số là một đại lượng mô tả sự biến thiên của hàm tại một điểm nào đó. Đạo hàm là một khái niệm cơ bản trong giải tích. Chẳng hạn, trong vật lý, đạo hàm biểu diễn vận tốc tức thời của một điểm chuyển động hoặc cường độ dòng điện tức thời tại một điểm trên dây dẫn.
Đạo hàm có màn biểu diễn trong hình học là thông số góc của tiếp tuyến với đồ thị trình diễn hàm số. Tiếp tuyến đó là giao động tuyến tính gần đúng nhất của hàm ở gần giá trị nguồn vào. Vì lý do đó nên đạo hàm còn được gọi là ” vận tốc biến thiên tức thời ” hay bằng tỉ số giữa số gia của biến nhờ vào và số gia của biến độc lập .Đạo hàm hoàn toàn có thể được khái quát hóa cho hàm số đa biến, ở đó nó được định nghĩa là một phép biến hóa tuyến tính có đồ thị là giao động tuyến tính đúng chuẩn nhất của đồ thị hàm khởi đầu. Ma trận Jacobi là ma trận dùng để diễn đạt phép biến hóa tuyến tính đó so với chuẩn được cho bởi những biến độc lập và biến nhờ vào, hoàn toàn có thể được tính nhờ những đạo hàm riêng so với biến độc lập. Với một hàm số thực đa biến, ma trận Jacobi được rút gọn về vectơ gradien .
Phép toán để tính đạo hàm được gọi là vi phân. Khái niệm ngược lại với đạo hàm là nguyên hàm. Định lý cơ bản của giải tích liên hệ nguyên hàm với tích phân. Vi phân và tích phân là hai công cụ cơ bản trong giải tích đơn biến.
Vi phân (differentiation) là quá trình để tính đạo hàm. Đạo hàm của hàm số y = f(x), với x là biến số, mô tả sự thay đổi giá trị của y tương ứng với độ biến thiên của x và còn được gọi là đạo hàm của f đối với x. Nếu x và y đều thuộc tập số thực thì đạo hàm của hàm số là hệ số góc của đồ thị hàm đó tại mỗi điểm trong hệ tọa độ Descartes.
 m = Δ y Δ x { displaystyle m = { frac { Delta y } { Delta x } } }
m = Δ y Δ x { displaystyle m = { frac { Delta y } { Delta x } } }
Xét trường hợp đơn giản nhất: gọi y là một hàm số bậc nhất biến x có đồ thị là một đường thẳng. Trong trường hợp này, y = f(x) = mx + b với m và b là số thực và hệ số góc m được tính bằng
- m = Δ y Δ x { displaystyle m = { frac { Delta y } { Delta x } } }
trong đó Δ (delta) là viết tắt của “thay đổi”, Δx (số gia của đối số) và Δy (số gia tương ứng của hàm số) chỉ sự biến thiên của x và y,
Δ
y
=
f
(
x
+
Δ
x
)
−
f
(
x
)
{displaystyle Delta y=f(x+Delta x)-f(x)}

- y + Δ y = f ( x + Δ x ) = m ( x + Δ x ) + b = m x + m Δ x + b = y + m Δ x. { displaystyle { begin { aligned } y + Delta y và = f left ( x + Delta x right ) và = m left ( x + Delta x right ) + b = mx + m Delta x + b và = y + m Delta x. end { aligned } } }

Suy ra
- Δ y = m Δ x. { displaystyle Delta y = m Delta x. }

Biểu thức trên cho biết giá trị thông số góc của một đường thẳng .
Xác định vận tốc đổi khác của hàm số bằng hình học Hình 1. x, f(x))Tiếp tuyến tại ())
Hình 1. x, f(x))Tiếp tuyến tại ())
Hình 2. Cát tuyến của đường cong y= f(x) tại 2 điểm (x, f(x)) và
(x + h, f(x + h))
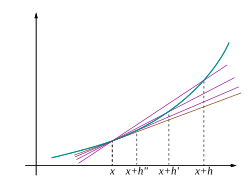
Hình 3. Khi h tiến dần về 0 thì cát tuyến trên trở thành tiếp tuyến của đồ thị
Hình 4. Hình ảnh động: tiếp tuyến của đồ thị là giới hạn của cát tuyến khi h tiến về 0.
Nếu f không phải là hàm bậc nhất (đồ thị của nó không phải là đường thẳng) thì tỉ số giữa mức thay đổi của y và mức thay đổi của x sẽ khác nhau trên khoảng được xét: phép vi phân là một cách để tìm một giá trị duy nhất của tốc độ thay đổi đó tại bất kỳ giá trị nào của x. Ý tưởng này được thực hiện bằng cách tìm giới hạn của Δy/Δx khi Δx tiến dần về 0, thể hiện qua các hình 1, 2, 3.
 Δ x → 0 { displaystyle Delta x to 0 }
Δ x → 0 { displaystyle Delta x to 0 }
Gọi f là hàm số thực xác định trên một lân cận mở của số thực a. Trong hình học cổ điển, tiếp tuyến của đồ thị hàm f tại a là đường thẳng duy nhất đi qua điểm (a, f(a)) thuộc đồ thị và không cắt ngang qua nó. Theo hình học, đạo hàm của y đối với x tại a là hệ số góc m của tiếp tuyến đó tại (a, f(a)). Giá trị này rất gần với hệ số góc của đường cát tuyến cắt đồ thị tại (a, f(a)) và một điểm lân cận (a + h, f(a + h)). Nếu h gần bằng 0 thì ta có được hệ số góc gần đúng của tiếp tuyến, và khi giá trị (tuyệt đối) của h càng nhỏ thì độ chính xác càng cao. m được tính bằng khoảng cách giữa hai giá trị y của hai điểm trên chia cho khoảng cách giữa hai giá trị x:
- m = Δ f ( a ) Δ a = f ( a + h ) − f ( a ) ( a + h ) − ( a ) = f ( a + h ) − f ( a ) h. { displaystyle m = { frac { Delta f ( a ) } { Delta a } } = { frac { f ( a + h ) – f ( a ) } { ( a + h ) – ( a ) } } = { frac { f ( a + h ) – f ( a ) } { h } }. }

Biểu thức trên được gọi là tỉ sai phân Newton. Để đạt được kết quả chính xác nhất thì có thể dùng đến khái niệm giới hạn. Vì về mặt hình học, giới hạn của cát tuyến là tiếp tuyến của đồ thị nên giới hạn của biểu thức khi h tiến về 0 (nếu có) là hệ số góc của tiếp tuyến tại (a, f(a)). Giới hạn đó được gọi là đạo hàm của f tại a:
- f ′ ( a ) = lim h → 0 f ( a + h ) − f ( a ) h. { displaystyle f ‘ ( a ) = lim _ { h to 0 } { frac { f ( a + h ) – f ( a ) } { h } }. }

Khi giới hạn này tồn tại, f được gọi là hàm số khả vi tại a. Từ định nghĩa này, rõ ràng hàm số khả vi f là hàm số tăng khi và chỉ khi đạo hàm của nó dương, và là hàm số giảm khi và chỉ khi đạo hàm của nó âm. Tính chất này thường được ứng dụng trong việc khảo sát tính đơn điệu của hàm, chẳng hạn như tìm các điểm cực trị.
Một cách tương tự, đạo hàm thỏa mãn nhu cầu đặc thù
- lim h → 0 f ( a + h ) − ( f ( a ) + f ′ ( a ) ⋅ h ) h = 0, { displaystyle lim _ { h to 0 } { frac { f ( a + h ) – ( f ( a ) + f ‘ ( a ) cdot h ) } { h } } = 0, }

và tính chất này có thể được hiểu bằng cách trực quan rằng tiếp tuyến của f tại a (hình 1) cho xấp xỉ tuyến tính chính xác nhất
- f ( a + h ) ≈ f ( a ) + f ′ ( a ) h { displaystyle f ( a + h ) approx f ( a ) + f ‘ ( a ) h }

đối với hàm f tại một điểm gần a (hay h nhỏ).
Thay h bằng 0 trong tỉ sai phân dẫn đến phép chia cho số 0, nên hệ số góc của tiếp tuyến không thể tìm được trực tiếp bằng cách này. Thay vào đó, ta đặt Q(h) là một hàm số biến h bằng với tỉ sai phân:
- Q. ( h ) = f ( a + h ) − f ( a ) h. { displaystyle Q. ( h ) = { frac { f ( a + h ) – f ( a ) } { h } }. }

Q(h) là hệ số góc của cát tuyến giữa (a, f(a)) và (a + h, f(a + h)). Nếu f là hàm số liên tục, nghĩa là đồ thị của nó không bị đứt đoạn hay bẻ gập, thì Q là hàm số liên tục cách xa điểm h = 0. Nếu giới hạn limh→0Q(h) tồn tại, tức là có thể gán cho Q(0) một giá trị bất kỳ để Q là hàm số liên tục, thì f khả vi tại a và đạo hàm của nó tại a bằng Q(0).
Trong thực tế, sự tồn tại tính liên tục của tỉ sai phân Q(h) tại h = 0 có thể được chứng minh bằng cách biến đổi tử số để loại h ở mẫu số. Phép biến đổi như vậy có thể giúp xác định giá trị giới hạn của Q với h nhỏ, dù Q vẫn không xác định tại h = 0. Quá trình này có thể kéo dài với các hàm phức tạp, và nhiều kỹ thuật lối tắt có thể được dùng để rút ngắn quá trình đó.
 Hàm số bậc hai
Hàm số bậc hai
Hàm số bậc hai f(x) = x2 có đạo hàm tại x = 3 và đạo hàm đó bằng 6. Điều này có được bằng cách tính giới hạn của tỉ sai phân của f(3) khi h tiến về 0:
- f ′ ( 3 ) = lim h → 0 f ( 3 + h ) − f ( 3 ) h = lim h → 0 ( 3 + h ) 2 − 3 2 h = lim h → 0 9 + 6 h + h 2 − 9 h = lim h → 0 6 h + h 2 h = lim h → 0 ( 6 + h ). { displaystyle { begin { aligned } f ‘ ( 3 ) và = lim _ { h to 0 } { frac { f ( 3 + h ) – f ( 3 ) } { h } } = lim _ { h to 0 } { frac { ( 3 + h ) ^ { 2 } – 3 ^ { 2 } } { h } } [ 10 pt ] và = lim _ { h to 0 } { frac { 9 + 6 h + h ^ { 2 } – 9 } { h } } = lim _ { h to 0 } { frac { 6 h + h ^ { 2 } } { h } } = lim _ { h to 0 } { ( 6 + h ) }. end { aligned } } }
![{displaystyle {begin{aligned}f'(3)&=lim _{hto 0}{frac {f(3+h)-f(3)}{h}}=lim _{hto 0}{frac {(3+h)^{2}-3^{2}}{h}}\[10pt]&=lim _{hto 0}{frac {9+6h+h^{2}-9}{h}}=lim _{hto 0}{frac {6h+h^{2}}{h}}=lim _{hto 0}{(6+h)}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c937146572a5443c648de2852705afc883b35599)
Ta thấy tỉ sai phân trên bằng 6 + h khi h ≠ 0 và không xác định khi h = 0. Giới hạn của nó là kết quả của việc cho h về 0 và là giá trị của 6 + h khi h trở nên rất nhỏ:
- lim h → 0 ( 6 + h ) = 6 + 0 = 6. { displaystyle lim _ { h to 0 } { ( 6 + h ) } = 6 + 0 = 6. }

Vậy hệ số góc của đồ thị hàm số tại điểm (3, 9) là 6 và đạo hàm của hàm số tại x = 3 là f′(3) = 6.
Tổng quát, đạo hàm của hàm số bậc hai tại x = a là f′(a) = 2a:
- f ′ ( a ) = lim h → 0 f ( a + h ) − f ( a ) h = lim h → 0 ( a + h ) 2 − a 2 h = lim h → 0 a 2 + 2 a h + h 2 − a 2 h = lim h → 0 2 a h + h 2 h = lim h → 0 ( 2 a + h ) = 2 a { displaystyle { begin { aligned } f ‘ ( a ) và = lim _ { h to 0 } { frac { f ( a + h ) – f ( a ) } { h } } = lim _ { h to 0 } { frac { ( a + h ) ^ { 2 } – a ^ { 2 } } { h } } [ 0.3 em ] và = lim _ { h to 0 } { frac { a ^ { 2 } + 2 ah + h ^ { 2 } – a ^ { 2 } } { h } } = lim _ { h to 0 } { frac { 2 ah + h ^ { 2 } } { h } } [ 0.3 em ] và = lim _ { h to 0 } { ( 2 a + h ) } = 2 a end { aligned } } }
![{displaystyle {begin{aligned}f'(a)&=lim _{hto 0}{frac {f(a+h)-f(a)}{h}}=lim _{hto 0}{frac {(a+h)^{2}-a^{2}}{h}}\[0.3em]&=lim _{hto 0}{frac {a^{2}+2ah+h^{2}-a^{2}}{h}}=lim _{hto 0}{frac {2ah+h^{2}}{h}}\[0.3em]&=lim _{hto 0}{(2a+h)}=2aend{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/029b05dcc8c1a9d40e75bfcf806cbae45964b0b2)
Tính khả vi và tính liên tục[sửa|sửa mã nguồn]
 Hàm số này không có đạo hàm tại điểm được ghi lại vì nó không liên tục tại đó .
Hàm số này không có đạo hàm tại điểm được ghi lại vì nó không liên tục tại đó .
Nếu f có đạo hàm tại a thì f cũng phải liên tục trên a. Lấy ví dụ, chọn một điểm a và coi f như là một hàm bước có giá trị là 1 với mọi x nhỏ hơn a và 10 với mọi x lớn hơn hoặc bằng a. f không thể có đạo hàm tại a. Nếu h âm thì cát tuyến từ a đến a + h sẽ rất dốc, và khi h dần về 0 thì hệ số góc sẽ dần đến vô cực. Nếu h dương thì cát tuyến từ a đến a + h có hệ số góc bằng 0. Trong mỗi trường hợp trên, cát tuyến không đạt đến một hệ số góc duy nhất, nên giới hạn của tỉ sai phân không tồn tại.
x = 0
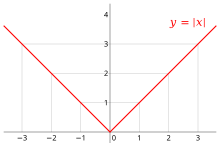
vì các giá trị hệ số góc của tiếp tuyến vẽ từ bên trái trục tung và từ bên phải trục tung là không bằng nhauHàm giá trị tuyệt đối là hàm liên tục, nhưng không khả vi tạivì những giá trị thông số góc của tiếp tuyến vẽ từ bên trái trục tung và từ bên phải trục tung là không bằng nhau
Tuy vậy, một hàm số có thể liên tục tại một điểm nhưng không có đạo hàm tại điểm đó. Chẳng hạn, hàm giá trị tuyệt đối f(x) = | x | liên tục tại x = 0 nhưng không có đạo hàm tại đó. Nếu h dương thì hệ số góc của cát tuyến từ 0 đến h là 1, còn nếu h âm thì hệ số góc đó bằng -1. Trên mặt phẳng tọa độ, đồ thị của hàm số đó bị “bẻ gập” tại x = 0. Kể cả hàm số có đồ thị trơn cũng không khả vi tại một điểm mà tiếp tuyến qua nó nằm dọc, chẳng hạn, hàm số f(x) = x1/3 không có đạo hàm tại x = 0.
Tóm lại, một hàm số có đạo hàm là hàm số liên tục, nhưng có những hàm liên tục lại không có đạo hàm .Phần lớn hàm số trong thực tiễn có đạo hàm tại mọi điểm ( hoặc tại hầu hết mọi điểm ). Trong thời kì đầu của lịch sử dân tộc ngành giải tích, nhiều nhà toán học cho rằng một hàm số liên tục luôn có đạo hàm tại nhiều điểm. Năm 1872, Weierstrass phát hiện ví dụ tiên phong về một hàm số liên tục tại mọi điểm nhưng không khả vi tại bất kỳ đâu. Hàm đó sau này được đặt tên là hàm Weierstrass. Năm 1931, Stefan Banach chứng tỏ được rằng tập hợp những hàm số có đạo hàm tại 1 số ít điểm nhất định là tập con rất nhỏ so với tập hợp những hàm liên tục. [ 2 ]
Đạo hàm là một hàm số[sửa|sửa mã nguồn]
 f ′ ( x ) = sin ( x 2 ) + 2 x 2 cos ( x 2 ) { displaystyle f ‘ ( x ) = sin { bigl ( } x ^ { 2 } { bigr ) } + 2 x ^ { 2 } cos { bigl ( } x ^ { 2 } { bigr ) } }
f ′ ( x ) = sin ( x 2 ) + 2 x 2 cos ( x 2 ) { displaystyle f ‘ ( x ) = sin { bigl ( } x ^ { 2 } { bigr ) } + 2 x ^ { 2 } cos { bigl ( } x ^ { 2 } { bigr ) } }
Gọi f là hàm số luôn có đạo hàm tại mọi điểm trên tập xác định. Chúng ta có thể tìm được một hàm số mà với x bất kì, giá trị của hàm bằng với giá trị của đạo hàm của f tại x. Hàm số đó được gọi là đạo hàm của f và kí hiệu là f’.
Thỉnh thoảng f có đạo hàm tại phần lớn điểm trên tập xác định (không phải mọi điểm). Hàm số mà giá trị của nó tại a bằng f′(a) khi f′(a) xác định, và không xác định tại mọi điểm khác, cũng được gọi là đạo hàm của f, dù tập xác định của nó hoàn toàn nhỏ hơn.
Bằng ý tưởng này, phép vi phân trở thành một hàm hợp: đạo hàm là một toán tử mà tập xác định của nó là tập hợp tất cả các hàm số có đạo hàm tại mọi điểm trên tập xác định và tập hợp đích của nó là một tập hợp các hàm số. Kí hiệu toán tử trên là D thì D(f) là hàm số f’. D(f) là hàm số xác định tại a nên ta có D(f)(a) = f′(a).
Để so sánh, ta xét hàm số f(x) = 2x: f là hàm số thực có đầu vào là một số, đầu ra cũng là một số:
- 1 ↦ 2, 2 ↦ 4, 3 ↦ 6. { displaystyle { begin { aligned } 1 và { } mapsto 2, 2 và { } mapsto 4, 3 và { } mapsto 6. end { aligned } } }

Toán tử D chỉ xác định trên các hàm số:
- D ( x ↦ 1 ) = ( x ↦ 0 ), D ( x ↦ x ) = ( x ↦ 1 ), D ( x ↦ x 2 ) = ( x ↦ 2 ⋅ x ). { displaystyle { begin { aligned } D ( x mapsto 1 ) và = ( x mapsto 0 ), D ( x mapsto x ) và = ( x mapsto 1 ), D left ( x mapsto x ^ { 2 } right ) và = ( x mapsto 2 cdot x ). end { aligned } } }

Đầu ra của D là một hàm số, có thể định được giá trị tại một điểm. Ví dụ: đầu vào của D là x ↦ x2 cho đầu ra x ↦ 2x mà ta gọi là f(x). Các giá trị tương ứng của đầu ra đó là f(1) = 2, f(2) = 4,…
Đạo hàm cấp cao[sửa|sửa mã nguồn]
Gọi f là hàm số khả vi và f ‘ là đạo hàm của nó. Đạo hàm của f ‘ (nếu có) được gọi là đạo hàm cấp hai của f và kí hiệu là f ′′. Tương tự, đạo hàm của đạo hàm cấp hai (nếu có) được gọi là đạo hàm cấp ba của f và kí hiệu là f ′′′. Cứ như vậy, ta xác định đạo hàm cấp n là đạo hàm của đạo hàm cấp n-1. Các đạo hàm trên được gọi chung là đạo hàm cấp cao.
Nếu x(t) mô tả vị trí của một vật ở thời gian t thì mỗi đạo hàm cấp cao của x mang một ý nghĩa riêng trong vật lý. Đạo hàm cấp một của x là vận tốc của vật. Đạo hàm cấp hai của x là gia tốc. Đạo hàm cấp ba của x là độ giật,…
Một hàm số f(x) không cần phải có đạo hàm (chẳng hạn, nếu hàm đó không liên tục). Tương tự, ngay cả khi f(x) có đạo hàm, nó có thể không có đạo hàm cấp hai. Chẳng hạn, cho hàm số
- f ( x ) = { + x 2, khi x ≥ 0 − x 2, khi x ≤ 0. { displaystyle f ( x ) = { begin { cases } + x ^ { 2 }, và { text { khi } } x geq 0 – x ^ { 2 }, và { text { khi } } x leq 0. end { cases } } }

f là hàm số khả vi và đạo hàm của nó tại x là
- f ′ ( x ) = { + 2 x, khi x ≥ 0 − 2 x, khi x ≤ 0. { displaystyle f ‘ ( x ) = { begin { cases } + 2 x, và { text { khi } } x geq 0 – 2 x, và { text { khi } } x leq 0. end { cases } } }

f’(x) không có đạo hàm tại x = 0. Những ví dụ tương tự cho thấy một hàm số có thể có đạo hàm cấp k (với k là số nguyên dương) nhưng không có đạo hàm cấp k + 1. Một hàm số có k đạo hàm liên tiếp thì khả vi k lần. Nếu đạo hàm thứ k là liên tục thì hàm số sẽ thuộc lớp khả vi Ck. Một hàm số có vô số đạo hàm là hàm khả vi vô hạn.
Trên trục số thực, mọi hàm số đa thức đều là hàm khả vi vô hạn. Theo quy tắc tính đạo hàm, đa thức bậc n sau n lần vi phân sẽ thành hàm hằng, và mọi đạo hàm tiếp theo đều bằng 0.
Đạo hàm của hàm số f tại một điểm x cho ta phép tính đa thức gần đúng với một hàm f(x). Ví dụ, nếu f (x)khả vi hai lần thì
- f ( x + h ) ≈ f ( x ) + f ′ ( x ) h + 1 2 f ″ ( x ) h 2 { displaystyle f ( x + h ) approx f ( x ) + f ‘ ( x ) h + { tfrac { 1 } { 2 } } f ‘ ‘ ( x ) h ^ { 2 } }

vì
- lim h → 0 f ( x + h ) − f ( x ) − f ′ ( x ) h − 1 2 f ″ ( x ) h 2 h 2 = 0. { displaystyle lim _ { h to 0 } { frac { f ( x + h ) – f ( x ) – f ‘ ( x ) h – { frac { 1 } { 2 } } f ‘ ‘ ( x ) h ^ { 2 } } { h ^ { 2 } } } = 0. }

Nếu f khả vi vô hạn thì đây là phần đầu của chuỗi Taylor với f tính được tại x + h gần với x.
Một điểm mà tại đó đạo hàm cấp hai của hàm số đổi dấu được gọi là điểm uốn.[3] Tại điểm uốn, đạo hàm cấp hai có thể bằng 0 (như tại điểm uốn x = 0 của hàm số
f
(
x
)
=
x
3
{displaystyle f(x)=x^{3}}

f
(
x
)
=
x
1
3
{displaystyle f(x)=x^{frac {1}{3}}}

Quy tắc tính đạo hàm[sửa|sửa mã nguồn]
Đạo hàm của hàm số có thể được tính theo định nghĩa bằng cách tìm tỉ sai phân của hàm và tính giới hạn của nó. Trong thực tế, từ một số hàm đơn giản, đạo hàm của các hàm số khác phức tạp được tính dễ dàng hơn bằng cách áp dụng các quy tắc nhất định.
Đạo hàm của hàm số sơ cấp[sửa|sửa mã nguồn]
Dưới đây là quy tắc tính đạo hàm của các hàm số sơ cấp, với a hoặc n là một số thực.[4][5]
- ( e x ) ′ = e x { displaystyle ( e ^ { x } ) ‘ = e ^ { x } }
- ( a x ) ′ = a x ln a { displaystyle ( a ^ { x } ) ‘ = a ^ { x } ln a }
- ( ln x ) ′ = 1 x ( x > 0 ) { displaystyle ( ln x ) ‘ = { frac { 1 } { x } } ( x > 0 ) }
0)}” class=”mwe-math-fallback-image-inline” src=”https://wikimedia.org/api/rest_v1/media/math/render/svg/e14bf1f8ab72c697775133a79afefbf8b73bd3a5″/>
- ( log a x ) ′ = 1 x ln a { displaystyle ( log _ { a } { x } ) ‘ = { frac { 1 } { x ln a } } }



- ( sin x ) ′ = cos x { displaystyle ( sin x ) ‘ = cos x }
- ( cos x ) ′ = − sin x { displaystyle ( cos x ) ‘ = – sin x }
- ( tan x ) ′ = 1 + tan 2 x = 1 cos 2 x { displaystyle ( tan x ) ‘ = 1 + { tan ^ { 2 } x } = { frac { 1 } { cos ^ { 2 } x } } }
- ( cot x ) ′ = − ( 1 + cot 2 x ) = − 1 sin 2 x { displaystyle ( cot x ) ‘ = – ( 1 + { cot ^ { 2 } x } ) = – { frac { 1 } { sin ^ { 2 } x } } }




- Đạo hàm của hàm số lượng giác ngược:
-
(
arcsin
x)
′=
1
1
−x
2
(
−
1
<img alt="{displaystyle (arcsin x)'={frac {1}{sqrt {1-x^{2}}}}qquad (-1<x -
(
arccos
x)
′=
−1
1
−x
2
(
−
1
<img alt="{displaystyle (arccos x)'=-{frac {1}{sqrt {1-x^{2}}}}qquad (-1<x - ( arctan x ) ′ = 1 1 + x 2 { displaystyle ( arctan x ) ‘ = { frac { 1 } { 1 + x ^ { 2 } } } }
- ( arccot x ) ′ = − 1 1 + x 2 { displaystyle ( operatorname { arccot } x ) ‘ = – { frac { 1 } { 1 + x ^ { 2 } } } }


Đạo hàm của hàm hợp[sửa|sửa mã nguồn]
Nhiều lúc việc tính đạo hàm bằng tỉ sai phân Newton rất phức tạp, ta hoàn toàn có thể tránh điều này qua 1 số ít quy tắc sau : [ 6 ]
- Đạo hàm của hằng số: ( C ) ′ = 0 { displaystyle ( C ) ‘ = 0 }
- Quy tắc cộng: ( α f + β g ) ′ = α f ′ + β g ′ { displaystyle ( alpha f + beta g ) ‘ = alpha f ‘ + beta g ‘ }
với mọi hàm số f và g và mọi số thực α { displaystyle alpha }
β
{displaystyle beta }
- Quy tắc nhân:



- ( f g ) ′ = f ′ g + f g ′ { displaystyle ( fg ) ‘ = f’g + fg ‘ }
f và g.
- ( α f ) ′ = α f ′ { displaystyle ( alpha f ) ‘ = alpha f ‘ }
α { displaystyle alpha }
Từ những quy tắc trên, ta suy ra :
- Với u là hàm số:
-
- ( e u ) ′ = u ′ e u { displaystyle ( e ^ { u } ) ‘ = u’e ^ { u } }
- ( a u ) ′ = u ′ a u ln a { displaystyle ( a ^ { u } ) ‘ = u’a ^ { u } ln a }
- ( ln u ) ′ = u ′ u { displaystyle ( ln u ) ‘ = { frac { u ‘ } { u } } }
- ( log a u ) ′ = u ′ u ln a { displaystyle ( log _ { a } { u } ) ‘ = { frac { u ‘ } { u ln a } } }
- Đạo hàm của hàm số lượng giác:
- ( sin u ) ′ = u ′ cos u { displaystyle ( sin u ) ‘ = u ‘ cos u }
- ( cos u ) ′ = − u ′ sin u { displaystyle ( cos u ) ‘ = – u ‘ sin u }
- ( tan u ) ′ = u ′ ( 1 + tan 2 u ) = u ′ cos 2 u { displaystyle ( tan u ) ‘ = u ‘ ( 1 + { tan ^ { 2 } u } ) = { frac { u ‘ } { cos ^ { 2 } u } } }
- ( cot u ) ′ = − u ′ ( 1 + cot 2 u ) = − u ′ sin 2 u { displaystyle ( cot u ) ‘ = – u ‘ ( 1 + { cot ^ { 2 } u } ) = – { frac { u ‘ } { sin ^ { 2 } u } } }
- ( e u ) ′ = u ′ e u { displaystyle ( e ^ { u } ) ‘ = u’e ^ { u } }








- Đạo hàm của các phân thức hữu tỉ:
- ( a x + b c x + d ) ′ = a d − b c ( c x + d ) 2 { displaystyle left ( { frac { ax + b } { cx + d } } right ) ‘ = { frac { ad-bc } { ( cx + d ) ^ { 2 } } } }
- ( a x 2 + b x + c e x + f ) ′ = a e x 2 + 2 a f x + ( b f − c e ) ( e x + f ) 2 { displaystyle left ( { frac { ax ^ { 2 } + bx + c } { ex + f } } right ) ‘ = { frac { aex ^ { 2 } + 2 afx + ( bf-ce ) } { ( ex + f ) ^ { 2 } } } }
- ( a 1 x 2 + b 1 x + c 1 a 2 x 2 + b 2 x + c 2 ) ′ = | a 1 b 1 a 2 b 2 | x 2 + 2 | a 1 c 1 a 2 c 2 | x + | b 1 c 1 b 2 c 2 | ( a 2 x 2 + b 2 x + c 2 ) 2 { displaystyle left ( { frac { a_ { 1 } x ^ { 2 } + b_ { 1 } x + c_ { 1 } } { a_ { 2 } x ^ { 2 } + b_ { 2 } x + c_ { 2 } } } right ) ‘ = { frac { { begin { vmatrix } a_ { 1 } và b_ { 1 } a_ { 2 } và b_ { 2 } end { vmatrix } } x ^ { 2 } + 2 { begin { vmatrix } a_ { 1 } và c_ { 1 } a_ { 2 } và c_ { 2 } end { vmatrix } } x + { begin { vmatrix } b_ { 1 } và c_ { 1 } b_ { 2 } và c_ { 2 } end { vmatrix } } } { ( a_ { 2 } x ^ { 2 } + b_ { 2 } x + c_ { 2 } ) ^ { 2 } } } }



Đạo hàm cấp cao[sửa|sửa mã nguồn]
- Đạo hàm lũy thừa:
(
x
m
)
(
n
)=
{
m
(
m
−
1
)
(
m
−
2
)
.
.
.
(
m
−
n
+
1
)x
m
−
n(
m
≥
n
)(
m
<img alt="{displaystyle (x^{m})^{(n)}={begin{cases}m(m-1)(m-2)…(m-n+1)x^{m-n}&(mgeq n)\0&(m)end{cases}}}> - Đạo hàm của hàm số mũ và logarit:
- ( log a x ) ( n ) = ( − 1 ) n − 1 ( n − 1 ) ! ln a 1 x n { displaystyle ( log _ { a } x ) ^ { ( n ) } = ( – 1 ) ^ { n-1 } { frac { ( n-1 ) ! } { ln a } } { frac { 1 } { x ^ { n } } } }
- ( ln x ) ( n ) = ( − 1 ) n − 1 ( n − 1 ) ! x − n { displaystyle ( ln x ) ^ { ( n ) } = ( – 1 ) ^ { n-1 } ( n-1 ) ! x ^ { – n } }
- ( e k x ) ( n ) = k n e k x { displaystyle ( e ^ { kx } ) ^ { ( n ) } = k ^ { n } e ^ { kx } }
- ( a x ) ( n ) = ( ln a ) n a x { displaystyle ( a ^ { x } ) ^ { ( n ) } = ( ln a ) ^ { n } a ^ { x } }




- Đạo hàm của hàm số lượng giác:
- ( sin a x ) ( n ) = a n sin ( a x + n π 2 ) { displaystyle ( sin ax ) ^ { ( n ) } = a ^ { n } sin left ( ax + { frac { n pi } { 2 } } right ) }
- ( cos a x ) ( n ) = a n cos ( a x + n π 2 ) { displaystyle ( cos ax ) ^ { ( n ) } = a ^ { n } cos left ( ax + { frac { n pi } { 2 } } right ) }


- Đạo hàm của phân thức hữu tỉ: ( 1 a x + b ) ( n ) = ( − 1 ) n a n n ! 1 ( a x + b ) n + 1 { displaystyle left ( { frac { 1 } { ax + b } } right ) ^ { ( n ) } = ( – 1 ) ^ { n } a ^ { n } n ! { frac { 1 } { ( ax + b ) ^ { n + 1 } } } }

Đạo hàm trong khoảng trống[sửa|sửa mã nguồn]
Hàm vectơ y của một biến số thực cho giá trị vectơ trong không gian Rn với mỗi số thực bất kì. Một hàm vectơ có thể được chia thành các hàm tọa độ y1(t), y2(t),…, yn(t), tức là y(t) = (y1(t),…, yn(t)). Nó cũng bao gồm các phương trình tham số tại R2 hay R3. Các hàm tọa độ này là hàm số thực, nên định nghĩa đạo hàm cũng đúng với chúng. Đạo hàm của y(t) là một vectơ, được gọi là vectơ tiếp tuyến, mà tọa độ của nó là đạo hàm của các hàm tọa độ, nghĩa là:
- y ′ ( t ) = ( y 1 ′ ( t ) ,. .., y n ′ ( t ) ) { displaystyle { textbf { y } } ‘ ( t ) = ( y_ { 1 } ‘ ( t ), …, y_ { n } ‘ ( t ) ) }

hay
- y ′ ( t ) = lim h → 0 y ( t + h ) − y ( t ) h { displaystyle { textbf { y } } ‘ ( t ) = lim _ { h to 0 } { frac { { textbf { y } } ( t + h ) – { textbf { y } } ( t ) } { h } } }

nếu giới hạn đó tồn tại. Ở đây tử thức là một đại lượng vectơ, không phải đại lượng vô hướng. Nếu đạo hàm của y tồn tại với mọi giá trị của t thì y‘ cũng là một hàm vectơ.
Nếu e1,…, en là các vectơ đơn vị trong Rn thì y(t) có thể được viết thành y1(t)e1 +… + yn(t)en. Vì mỗi vectơ đơn vị đều là hằng số nên theo quy tắc nhân:
- y ′ ( t ) = y 1 ′ ( t ) e 1 +. .. + y n ′ ( t ) e n { displaystyle { textbf { y } } ‘ ( t ) = y_ { 1 } ‘ ( t ) { textbf { e } } _ { 1 } + … + y_ { n } ‘ ( t ) { textbf { e } } _ { n } }

Trong vật lý, nếu y(t) là vectơ vị trí của một chất điểm tại thời điểm t thì y‘(t) là vectơ vận tốc của chất điểm đó tại thời điểm t.
Đạo hàm riêng[sửa|sửa mã nguồn]
Gọi f là hàm số đa biến, chẳng hạn:
- f ( x, y ) = x 2 + x y + y 2 { displaystyle f ( x, y ) = x ^ { 2 } + xy + y ^ { 2 } }

f còn được gọi là họ các hàm một biến được biểu thị bởi biến số khác:
- f ( x, y ) = f x ( y ) = x 2 + x y + y 2 { displaystyle f ( x, y ) = f_ { x } ( y ) = x ^ { 2 } + xy + y ^ { 2 } }

Nói cách khác, mỗi giá trị của x xác định một hàm đơn biến fx:
- x ↦ f x, { displaystyle x mapsto f_ { x }, }
- f x ( y ) = x 2 + x y + y 2. { displaystyle f_ { x } ( y ) = x ^ { 2 } + xy + y ^ { 2 }. }


Chọn một giá trị x = a, ta có hàm số fa:
- f a ( y ) = a 2 + a y + y 2. { displaystyle f_ { a } ( y ) = a ^ { 2 } + ay + y ^ { 2 }. }

Ở đây a là hằng số, không phải là biến nên fa là hàm đơn biến. Theo định nghĩa đạo hàm đơn biến thì
- f a ′ ( y ) = a + 2 y. { displaystyle f_ { a } ‘ ( y ) = a + 2 y. }

Lặp lại tương tự với mọi giá trị khác của a. Tổng hợp lại, ta có hàm số biểu diễn sự biến thiên của f theo y:
- ∂ f ∂ y ( x, y ) = x + 2 y. { displaystyle { frac { partial f } { partial y } } ( x, y ) = x + 2 y. , }

Đó là đạo hàm riêng của f theo y. Ở đây ∂ được gọi là kí hiệu đạo hàm riêng. Tổng quát, đạo hàm riêng của hàm f(x1,…, xn) theo hướng xi tại điểm (a1,…, an) là:
- ∂ f ∂ x i ( a 1, …, a n ) = lim h → 0 f ( a 1, …, a i + h, …, a n ) − f ( a 1, …, a i, …, a n ) h. { displaystyle { frac { partial f } { partial x_ { i } } } ( a_ { 1 }, ldots, a_ { n } ) = lim _ { h to 0 } { frac { f ( a_ { 1 }, ldots, a_ { i } + h, ldots, a_ { n } ) – f ( a_ { 1 }, ldots, a_ { i }, dots, a_ { n } ) } { h } }. }

Trong tỉ sai phân trên, mọi biến trừ xi đều mang giá trị không đổi, nên hàm đơn biến sau được xác định:
- f a 1, …, a i − 1, a i + 1, …, a n ( x i ) = f ( a 1, …, a i − 1, x i, a i + 1, …, a n ), { displaystyle f_ { a_ { 1 }, ldots, a_ { i-1 }, a_ { i + 1 }, ldots, a_ { n } } ( x_ { i } ) = f ( a_ { 1 }, ldots, a_ { i-1 }, x_ { i }, a_ { i + 1 }, ldots, a_ { n } ), }

và theo định nghĩa :
- d f a 1, …, a i − 1, a i + 1, …, a n d x i ( x i ) = ∂ f ∂ x i ( a 1, …, a n ). { displaystyle { frac { df_ { a_ { 1 }, ldots, a_ { i-1 }, a_ { i + 1 }, ldots, a_ { n } } } { dx_ { i } } } ( x_ { i } ) = { frac { partial f } { partial x_ { i } } } ( a_ { 1 }, ldots, a_ { n } ). }

Nói cách khác, với các giá trị khác nhau của a, ta xác định được một họ các hàm đơn biến như ví dụ trên đây.
Một ví dụ quan trọng của hàm đa biến là trường hợp một hàm vô hướng f(x1,…, xn) xác định trên một miền của không gian Euclid Rn (chẳng hạn, R2 hay R3). Trong trường hợp này, f có đạo hàm riêng ∂f/∂xj với mỗi biến xj. Tại điểm (a1,…, an), các đạo hàm riêng này định ra vectơ
- ∇ f ( a 1, …, a n ) = ( ∂ f ∂ x 1 ( a 1, …, a n ), …, ∂ f ∂ x n ( a 1, …, a n ) ). { displaystyle nabla f ( a_ { 1 }, ldots, a_ { n } ) = left ( { frac { partial f } { partial x_ { 1 } } } ( a_ { 1 }, ldots, a_ { n } ), ldots, { frac { partial f } { partial x_ { n } } } ( a_ { 1 }, ldots, a_ { n } ) right ). }

Vectơ này được gọi là gradien của f tại a. Nếu f khả vi tại mọi điểm trong miền xác định thì gradien là một hàm vectơ ∇f đưa một điểm (a1,…, an) đến vectơ ∇f(a1,…, an). Do đó, gradien là một trường vectơ.
Đạo hàm có hướng[sửa|sửa mã nguồn]
Nếu f là hàm số thực trên Rn thì đạo hàm riêng của f mô tả sự biến thiên của nó theo hướng của các trục tọa độ. Chẳng hạn, nếu f là một hàm gồm hai biến x và y thì các đạo hàm riêng của f biểu diễn sự biến thiên của nó theo hai trục x và y. Tuy nhiên, chúng không trực tiếp biểu diễn được sự biến thiên của f theo các trục khác (như đường thẳng y = x). Để khắc phục, ta sử dụng đạo hàm có hướng. Chọn một vectơ
- v = ( v 1, …, v n ). { displaystyle { textbf { v } } = ( v_ { 1 }, ldots, v_ { n } ). }

Đạo hàm có hướng của f theo hướng của v tại điểm x là giới hạn
- D v f ( x ) = lim h → 0 f ( x + h v ) − f ( x ) h. { displaystyle D_ { textbf { v } } f ( { textbf { x } } ) = lim _ { h to 0 } { frac { f ( { textbf { x } } + h { textbf { v } } ) – f ( { textbf { x } } ) } { h } }. }

Trong nhiều trường hợp, để hỗ trợ tính toán, ta thường thay đổi độ dài vectơ để quy về bài toán tính đạo hàm có hướng theo một vectơ đơn vị. Để chứng minh hiệu quả, ta đặt v = λu. Thay h = k/λ vào tỉ sai phân, ta có:
- f ( x + ( k / λ ) ( λ u ) ) − f ( x ) k / λ = λ ⋅ f ( x + k u ) − f ( x ) k. { displaystyle { frac { f ( { textbf { x } } + ( k / lambda ) ( lambda { textbf { u } } ) ) – f ( { textbf { x } } ) } { k / lambda } } = lambda cdot { frac { f ( { textbf { x } } + k { textbf { u } } ) – f ( { textbf { x } } ) } { k } }. }

hay bằng λ lần tỉ sai phân của đạo hàm có hướng của f theo u. Hơn nữa, việc lấy giới hạn khi h tiến về 0 cũng giống như khi k tiến về 0 vì h và k là bội số của nhau. Do đó, Dv(f) = λDu(f). Vì tính chất này nên thường ta chỉ xét đạo hàm có hướng đối với các vectơ đơn vị.
Nếu tất cả đạo hàm riêng của f tồn tại và liên tục tại x thì chúng xác định đạo hàm có hướng của f theo hướng của v bằng công thức:
- D v f ( x ) = ∑ j = 1 n v j ∂ f ∂ x j. { displaystyle D_ { mathbf { v } } { f } ( { boldsymbol { x } } ) = sum _ { j = 1 } ^ { n } v_ { j } { frac { partial f } { partial x_ { j } } }. }

Đó là hệ quả của định nghĩa đạo hàm tổng. Theo đó, đạo hàm có hướng tuyến tính trên v, nghĩa là Dv + w(f) = Dv(f) + Dw(f).
Định nghĩa trên cũng đúng khi f là hàm số lấy giá trị trong Rm. Khi đó, đạo hàm có hướng là một vectơ trong Rm.
Đạo hàm tổng, vi phân tổng và ma trận Jacobi[sửa|sửa mã nguồn]
Khi f là hàm số xác định trên một tập mở của Rn đến Rm thì đạo hàm có hướng của f theo một hướng xác định là phép xấp xỉ tuyến tính chính xác nhất của f tại điểm đó và theo hướng đó. Nhưng khi n > 1 thì không đạo hàm có hướng nào có thể mô tả trạng thái biến thiên của f một cách toàn diện. Để khắc phục, ta sử dụng đạo hàm tổng. Với mỗi vectơ v bắt đầu tại a, ta có:
- f ( a + v ) ≈ f ( a ) + f ′ ( a ) v. { displaystyle f ( { textbf { a } } + { textbf { v } } ) approx f ( { textbf { a } } ) + f ‘ ( { textbf { a } } ) { textbf { v } }. }

Giống như đạo hàm đơn biến, f‘(a) được chọn sao cho sai số trong biểu thức là thấp nhất có thể.
Nếu n và m cùng bằng 1 thì đạo hàm f‘(a) là một số và f‘(a)v là tích của hai số. Nhưng trong không gian, f‘(a) không thể là một số, vì nếu vậy thì f‘(a)v phải là một vectơ trên Rn và số hạng còn lại là vectơ trên Rm, đó là điều vô lý. Do đó, f‘(a) phải là một hàm đưa vectơ ở Rn đến vectơ ở Rm và f‘(a)v phải chứng tỏ hàm đó xác định tại v.
Để tìm xem hàm đó có dạng gì, chú ý quan tâm rằng phép giao động tuyến tính hoàn toàn có thể được viết lại thành
- f ( a + v ) − f ( a ) ≈ f ′ ( a ) v. { displaystyle f ( { textbf { a } } + { textbf { v } } ) – f ( { textbf { a } } ) approx f ‘ ( { textbf { a } } ) { textbf { v } }. }

Nếu ta chọn một vectơ w khác v thì biểu thức này xác định thêm một phép xấp xỉ tuyến tính khác bằng cách thay v bằng w. Nó cũng xác định một phép xấp xỉ tuyến tính thứ ba bằng cách thay v bằng w và thay a bằng a + v. Trừ vế cho vế ở hai biểu thức trên, ta được
- f ( a + v + w ) − f ( a + v ) − f ( a + w ) + f ( a ) ≈ f ′ ( a + v ) w − f ′ ( a ) w. { displaystyle f ( { textbf { a } } + { textbf { v } } + { textbf { w } } ) – f ( { textbf { a } } + { textbf { v } } ) – f ( { textbf { a } } + { textbf { w } } ) + f ( { textbf { a } } ) approx f ‘ ( { textbf { a } } + { textbf { v } } ) { textbf { w } } – f ‘ ( { textbf { a } } ) { textbf { w } }. }

Nếu coi v là nhỏ và đạo hàm đó biến đổi liên tục trên a thì f‘(a + v) xấp xỉ bằng f‘(a) nên vế phải xấp xỉ bằng 0. Bằng cách ứng dụng phép xấp xỉ tuyến tính với v thay bằng v + w, ta viết lại vế trái như sau:
- 0 ≈ f ( a + v + w ) − f ( a + v ) − f ( a + w ) + f ( a ) = ( f ( a + v + w ) − f ( a ) ) − ( f ( a + v ) − f ( a ) ) − ( f ( a + w ) − f ( a ) ) ≈ f ′ ( a ) ( v + w ) − f ′ ( a ) v − f ′ ( a ) w. { displaystyle { begin { aligned } 0 và approx f ( { textbf { a } } + { textbf { v } } + { textbf { w } } ) – f ( { textbf { a } } + { textbf { v } } ) – f ( { textbf { a } } + { textbf { w } } ) + f ( { textbf { a } } ) và = ( f ( { textbf { a } } + { textbf { v } } + { textbf { w } } ) – f ( { textbf { a } } ) ) – ( f ( { textbf { a } } + { textbf { v } } ) – f ( { textbf { a } } ) ) – ( f ( { textbf { a } } + { textbf { w } } ) – f ( { textbf { a } } ) ) và approx f ‘ ( { textbf { a } } ) ( { textbf { v } } + { textbf { w } } ) – f ‘ ( { textbf { a } } ) { textbf { v } } – f ‘ ( { textbf { a } } ) { textbf { w } }. end { aligned } } }

Điều này chứng tỏ rằng f‘(a) là phép biến đổi tuyến tính từ không gian vectơ Rn sang không gian vectơ Rm.
Thực tế, đạo hàm đơn biến là phép xấp xỉ tuyến tính chính xác nhất vì đó là giới hạn của tỉ sai phân. Tuy nhiên, biểu thức này không hợp lý trong không gian, vì không phải lúc nào ta cũng thực hiện được phép chia các vectơ. Đặc biệt, trong tỉ sai phân, tử thức và mẫu thức không thuộc cùng một không gian vectơ: tử thuộc tập con Rn còn mẫu thuộc tập Rm. Hơn nữa, đạo hàm là phép biến đổi tuyến tính, do đó, để f‘(a) là phép xấp xỉ tuyến tính chính xác nhất thì cần điều chỉnh một công thức khác cho đạo hàm đơn biến để giải quyết vấn đề. Nếu f: R → R, ta biến đổi biểu thức để cho thấy đạo hàm của f tại a là một số f‘(a) duy nhất sao cho
- lim h → 0 f ( a + h ) − ( f ( a ) + f ′ ( a ) h ) h = 0 { displaystyle lim _ { h to 0 } { frac { f ( a + h ) – ( f ( a ) + f ‘ ( a ) h ) } { h } } = 0 }

hoặc đồng nghĩa tương quan với
- lim h → 0 | f ( a + h ) − ( f ( a ) + f ′ ( a ) h ) | | h | = 0 { displaystyle lim _ { h to 0 } { frac { | f ( a + h ) – ( f ( a ) + f ‘ ( a ) h ) | } { | h | } } = 0 }

vì số lượng giới hạn của biểu thức bằng 0 khi và chỉ khi giá trị tuyệt đối của nó tiến về 0. Biểu thức cuối hoàn toàn có thể vận dụng được cho hàm đa biến bằng cách thay giá trị tuyệt đối bằng chuẩn .
Do đó, người ta định nghĩa: Đạo hàm tổng của f tại a là phép biến đổi tuyến tính duy nhất f‘(a): Rn → Rm sao cho
- lim h → 0 ‖ f ( a + h ) − ( f ( a ) + f ′ ( a ) h ) ‖ ‖ h ‖ = 0. { displaystyle lim _ { { textbf { h } } to 0 } { frac { | f ( { textbf { a } } + { textbf { h } } ) – ( f ( { textbf { a } } ) + f ‘ ( { textbf { a } } ) { textbf { h } } ) | } { | { textbf { h } } | } } = 0. }

Nếu đạo hàm tổng này tồn tại ở a thì tất cả đạo hàm riêng và đạo hàm có hướng của f đều tồn tại ở a, và với mọi v, f‘(a)v là đạo hàm có hướng của f theo hướng v. Nếu ta viết lại f theo các hàm tọa độ, tức là f = (f1, f2,…, fm) thì đạo hàm tổng có thể được biểu thị bằng cách coi các đạo hàm riêng như là một ma trận. Ma trận đó được gọi là ma trận Jacobi của f tại a:
- f ′ ( a ) = Jac a = ( ∂ f i ∂ x j ) i j. { displaystyle f ‘ ( mathbf { a } ) = operatorname { Jac } _ { mathbf { a } } = left ( { frac { partial f_ { i } } { partial x_ { j } } } right ) _ { ij }. }

Nếu đạo hàm riêng tồn tại và liên tục thì đạo hàm tổng tồn tại, được xác định bằng ma trận Jacobi và phụ thuộc liên tục vào a.
Định nghĩa đạo hàm tổng còn gộp vào thêm định nghĩa đạo hàm đơn biến, tức là, nếu f là hàm số thực đơn biến thì đạo hàm tổng tồn tại khi và chỉ khi đạo hàm thường của nó tồn tại. Ma trận Jacobi khi đó được thu gọn thành ma trận 1×1, trong đó đạo hàm f‘(x) là phần tử duy nhất. Ma trận 1×1 này thỏa mãn tính chất f(a + h) – (f(a) + f‘(a)h) có giá trị xấp xỉ bằng 0, hay
- f ( a + h ) ≈ f ( a ) + f ′ ( a ) h. { displaystyle f ( a + h ) approx f ( a ) + f ‘ ( a ) h. }

Đây cũng là phát biểu cho rằng hàm
x
↦
f
(
a
)
+
f
′
(
a
)
(
x
−
a
)
{displaystyle xmapsto f(a)+f'(a)(x-a)}

Vi tích phân là một nhánh của toán học tập trung chuyên sâu vào số lượng giới hạn, hàm số, đạo hàm, tích phân và chuỗi vô hạn. Isaac Newton và Gottfried Leibniz tìm ra vi tích phân vào giữa thế kỷ 17 .
