Một Hệ tọa độ Descartes xác định vị trí của một điểm (point) trên một mặt phẳng (plane) cho trước bằng một cặp số tọa độ (x, y). Trong đó, x và y là 2 giá trị được xác định bởi 2 đường thẳng có hướng vuông góc với nhau (cùng đơn vị đo). 2 đường thẳng đó gọi là trục tọa độ (coordinate axis) (hoặc đơn giản là trục); trục nằm ngang gọi là trục hoành, trục đứng gọi là trục tung; điểm giao nhau của 2 đường gọi là gốc tọa độ (origin) và nó có giá trị là (0, 0).
Hệ tọa độ này là ý tưởng của nhà toán học và triết học người Pháp René Descartes thể hiện vào năm 1637 trong hai bài viết của ông. Trong phần hai của bài Phương pháp luận (Descartes) (tiếng Pháp: Discours de la méthode, tựa Pour bien conduire sa raison, et chercher la vérité dans les sciences), ông đã giới thiệu ý tưởng mới về việc xác định vị trí của một điểm hay vật thể trên một bề mặt bằng cách dùng hai trục giao nhau để đo. Còn trong bài La Géométrie, ông phát triển sâu hơn khái niệm trên.
Descartes là người đã có công hợp nhất đại số và hình học Euclide. Công trình này của ông có tác động ảnh hưởng đến sự tăng trưởng của ngành hình học giải tích, tích phân, và khoa học map .
Ngoài ra, ý tưởng về hệ tọa độ có thể được mở rộng ra không gian ba chiều (three-dimensional space) bằng cách sử dụng 3 tọa độ Descartes (nói cách khác là thêm một trục tọa độ vào một hệ tọa độ Descartes). Một cách tổng quát, một hệ tọa độ n-chiều có thể được xây dựng bằng cách sử dụng n tọa độ Descartes (tương đương với n-trục).
Hệ tọa độ trên mặt phẳng ( 2 chiều )[sửa|sửa mã nguồn]
Là 2 trục vuông góc x’Ox và y’Oy mà trên đó đã chọn 2 vectơ đơn vị
i
→
{displaystyle {vec {i}}}

j
→
{displaystyle {vec {j}}}

Trục x’Ox ( hay trục Ox ) gọi là trục hoành .Trục y’Oy ( hay trục Oy ) gọi là trục tung .Điểm O được gọi là gốc tọa độ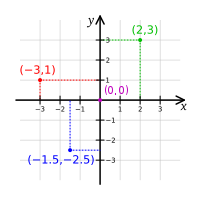 (màu xanh lá cây), (-3,1) (màu xanh đỏ), (-1.5,-2.5) (màu xanh da trời) và (0,0), gốc tọa độ, (màu tím).Hình 1 – Hệ tọa độ Đề-Các với bốn điểm lần lượt có tọa độ : ( 2,3 ), ( – 3,1 ), ( – 1.5, – 2.5 ) và ( 0,0 ), gốc tọa độ ,
(màu xanh lá cây), (-3,1) (màu xanh đỏ), (-1.5,-2.5) (màu xanh da trời) và (0,0), gốc tọa độ, (màu tím).Hình 1 – Hệ tọa độ Đề-Các với bốn điểm lần lượt có tọa độ : ( 2,3 ), ( – 3,1 ), ( – 1.5, – 2.5 ) và ( 0,0 ), gốc tọa độ ,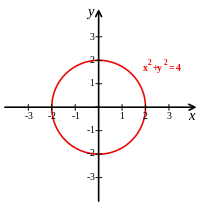 2 + y2 = 4.Hình 2 – Hệ tọa độ Đề-Các với một đường tròn có tâm trùng với gốc tọa độ và nửa đường kính bằng 2. Đường tròn này có phương trình : x + y = 4 .
2 + y2 = 4.Hình 2 – Hệ tọa độ Đề-Các với một đường tròn có tâm trùng với gốc tọa độ và nửa đường kính bằng 2. Đường tròn này có phương trình : x + y = 4 . Hình 3 – Hệ tọa độ Đề-Các với bốn góc phần tư. Các mũi tên ở hai đầu của mỗi trục nhằm mục đích minh họa rằng những trục này trải dài vô tận theo hướng của mũi tên .
Hình 3 – Hệ tọa độ Đề-Các với bốn góc phần tư. Các mũi tên ở hai đầu của mỗi trục nhằm mục đích minh họa rằng những trục này trải dài vô tận theo hướng của mũi tên .
Tọa độ vecto[sửa|sửa mã nguồn]
Nếu
a
→
=
x
i
→
+
y
j
→
{displaystyle {vec {a}}=x{vec {i}}+y{vec {j}}}

a
→
{displaystyle {vec {a}}}

a
→
{displaystyle {vec {a}}}
.
Ký hiệu
a
→
=
(
x
;
y
)
{displaystyle {vec {a}}=(x;y)}

Tọa độ điểm[sửa|sửa mã nguồn]
Mỗi điểm M được xác lập bởi một cặp số M ( x, y ), được gọi là tọa độ điểm M, x được gọi là hoành độ và y được gọi là tung độ của điểm MTính chất :
Tìm tọa độ của vecto biết tọa độ điểm đầu và cuối[sửa|sửa mã nguồn]
Cho 2 điểm
A
(
x
A
;
y
A
)
{displaystyle A(x_{A};y_{A})}

B
(
x
B
;
y
B
)
{displaystyle B(x_{B};y_{B})}

A
B
→
=
(
x
B
−
x
A
;
y
B
−
y
A
)
{displaystyle {overrightarrow {AB}}=left(x_{B}-x_{A};y_{B}-y_{A}right)}

Độ dài vecto và khoảng cách giữa 2 điểm[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
)
{displaystyle {vec {a}}=(a_{1};a_{2})}

|
a
→
|
=
a
1
2
+
a
2
2
{displaystyle leftvert {vec {a}}rightvert ={sqrt {a_{1}^{2}+a_{2}^{2}}}}

a
→
{displaystyle {vec {a}}}
Cho 2 điểm
A
(
x
A
;
y
A
)
{displaystyle A(x_{A};y_{A})}
và
B
(
x
B
;
y
B
)
{displaystyle B(x_{B};y_{B})}
, khi đó độ dài đoạn thẳng AB hay khoảng cách giữa A và B là
A
B
=
(
x
B
−
x
A
)
2
+
(
y
B
−
y
A
)
2
{displaystyle AB={sqrt {left(x_{B}-x_{A}right)^{2}+left(y_{B}-y_{A}right)^{2}}}}

Góc giữa 2 vecto[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
)
{displaystyle {vec {a}}=(a_{1};a_{2})}
và
b
→
=
(
b
1
;
b
2
)
{displaystyle {vec {b}}=(b_{1};b_{2})}

α
{displaystyle alpha }

a
→
{displaystyle {vec {a}}}
và
b
→
{displaystyle {vec {b}}}

cos
α
=
a
1
b
1
+
a
2
b
2
(
a
1
2
+
a
2
2
)
(
b
1
2
+
b
2
2
)
{displaystyle cos alpha ={a_{1}b_{1}+a_{2}b_{2} over {sqrt {left(a_{1}^{2}+a_{2}^{2}right)left(b_{1}^{2}+b_{2}^{2}right)}}}}

Một số biểu thức tọa độ[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
)
{displaystyle {vec {a}}=(a_{1};a_{2})}
ta có
k
a
→
=
(
k
a
1
;
k
a
2
)
{displaystyle k{vec {a}}=(ka_{1};ka_{2})}

Cho a → = ( a 1 ; a 2 ) { displaystyle { vec { a } } = ( a_ { 1 } ; a_ { 2 } ) } và b → = ( b 1 ; b 2 ) { displaystyle { vec { b } } = ( b_ { 1 } ; b_ { 2 } ) } ta có
Cho đoạn thẳng AB có
A
(
x
A
;
y
A
)
{displaystyle A(x_{A};y_{A})}
và
B
(
x
B
;
y
B
)
{displaystyle B(x_{B};y_{B})}
, Khi đó
I
(
x
A
+
x
B
2
;
y
A
+
y
B
2
)
{displaystyle Ileft({x_{A}+x_{B} over 2};{y_{A}+y_{B} over 2}right)}

Cho
△
A
B
C
{displaystyle bigtriangleup ABC}

A
(
x
A
;
y
A
)
{displaystyle A(x_{A};y_{A})}
,
B
(
x
B
;
y
B
)
{displaystyle B(x_{B};y_{B})}
và
C
(
x
C
;
y
C
)
{displaystyle C(x_{C};y_{C})}

G
(
x
A
+
x
B
+
x
C
3
;
y
A
+
y
B
+
y
C
3
)
{displaystyle Gleft({x_{A}+x_{B}+x_{C} over 3};{y_{A}+y_{B}+y_{C} over 3}right)}

△
A
B
C
{displaystyle bigtriangleup ABC}
Hệ tọa độ trong khoảng trống ( 3 chiều )[sửa|sửa mã nguồn]
Là 3 trục vuông góc nhau từng đôi một x’Ox, y’Oy, z’Oz mà trên đó đã chọn 3 véc-tơ đơn vị
i
→
{displaystyle {vec {i}}}
,
j
→
{displaystyle {vec {j}}}
,
k
→
{displaystyle {vec {k}}}

Trục x’Ox ( hay trục Ox ) gọi là trục hoành .Trục y’Oy ( hay trục Oy ) gọi là trục tung .
Trục z’Oz (hay trục Oz) gọi là trục cao.
Điểm O được gọi là gốc tọa độ3 trục tọa độ nói trên vuông góc với nhau tạo thành 3 mặt phẳng tọa độ là Oxy, Oyz và Ozx vuộng góc với nhau từng đôi một y có chiều chạy xa người quan sát.Tranh 4 – Hệ tọa độ Descartes ba chiều với trụccó chiều chạy xa người quan sát .
y có chiều chạy xa người quan sát.Tranh 4 – Hệ tọa độ Descartes ba chiều với trụccó chiều chạy xa người quan sát . x có chiều chạy về phía người quan sát.Tranh 5 – Hệ tọa độ Descartes ba chiều với trụccó chiều chạy về phía người quan sát .
x có chiều chạy về phía người quan sát.Tranh 5 – Hệ tọa độ Descartes ba chiều với trụccó chiều chạy về phía người quan sát . Tranh 6 – The left-handed orientation is shown on the left, and the right-handed on the right .
Tranh 6 – The left-handed orientation is shown on the left, and the right-handed on the right . Tranh 7 – The right-handed Cartesian coordinate system indicating the coordinate planes .
Tranh 7 – The right-handed Cartesian coordinate system indicating the coordinate planes .
Tọa độ của điểm[sửa|sửa mã nguồn]
Trong khoảng trống, mỗi điểm M được xác lập bởi bộ số M ( x, y, z ). và ngược lại, bộ số đó được gọi là tọa độ của điểm M, x được gọi là hoành độ, y được gọi là tung độ và z được gọi là cao độ của điểm M .Tính chất
- ∀ x y ≠ 0, A ( x, y, 0 ) ∈ O x y { displaystyle forall xy neq 0, A ( x, y, 0 ) in Oxy }
- ∀ x z ≠ 0, A ( x, 0, z ) ∈ O x z { displaystyle forall xz neq 0, A ( x, 0, z ) in Oxz }
- ∀ y z ≠ 0, A ( 0, y, z ) ∈ O y z { displaystyle forall yz neq 0, A ( 0, y, z ) in Oyz }
- ∀ x ≠ 0, M ( x ; 0 ; 0 ) ∈ O x { displaystyle forall x neq 0, M ( x ; 0 ; 0 ) in Ox }
- ∀ y ≠ 0, M ( 0 ; y ; 0 ) ∈ O y { displaystyle forall y neq 0, M ( 0 ; y ; 0 ) in Oy }
- ∀ z ≠ 0, M ( 0 ; 0 ; z ) ∈ O z { displaystyle forall z neq 0, M ( 0 ; 0 ; z ) in Oz }






Tọa độ của vector[sửa|sửa mã nguồn]
Trong không gian, cho vectơ
a
→
=
x
i
→
+
y
j
→
+
z
k
→
{displaystyle {vec {a}}=x{vec {i}}+y{vec {j}}+z{vec {k}}}

a
→
{displaystyle {vec {a}}}
.
Ký hiệu:
a
→
=
(
x
;
y
;
z
)
{displaystyle {vec {a}}=(x;y;z)}

Liên hệ giữa tọa độ vectơ và tọa độ điểm[sửa|sửa mã nguồn]
Cho 2 điểm
A
(
x
A
;
y
A
;
z
A
)
{displaystyle A(x_{A};y_{A};z_{A})}

B
(
x
B
;
y
B
;
z
B
)
{displaystyle B(x_{B};y_{B};z_{B})}

A
B
→
=
(
x
B
−
x
A
;
y
B
−
y
A
;
z
B
−
z
A
)
{displaystyle {overrightarrow {AB}}=left(x_{B}-x_{A};y_{B}-y_{A};z_{B}-z_{A}right)}

Cho điểm
M
(
x
M
;
y
M
;
z
M
)
{displaystyle M(x_{M};y_{M};z_{M})}

O
M
→
=
(
x
M
;
y
M
;
z
M
)
{displaystyle {vec {OM}}=(x_{M};y_{M};z_{M})}

Độ dài vecto và khoảng cách giữa 2 điểm[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
;
a
3
)
{displaystyle {vec {a}}=(a_{1};a_{2};a_{3})}

|
a
→
|
=
a
1
2
+
a
2
2
+
a
3
2
{displaystyle leftvert {vec {a}}rightvert ={sqrt {a_{1}^{2}+a_{2}^{2}+a_{3}^{2}}}}

a
→
{displaystyle {vec {a}}}
Cho 2 điểm
A
(
x
A
;
y
A
;
z
A
)
{displaystyle A(x_{A};y_{A};z_{A})}
và
B
(
x
B
;
y
B
;
z
B
)
{displaystyle B(x_{B};y_{B};z_{B})}
, khi đó độ dài đoạn thẳng AB hay khoảng cách giữa A và B là
A
B
=
(
x
B
−
x
A
)
2
+
(
y
B
−
y
A
)
2
+
(
z
B
−
z
A
)
2
{displaystyle AB={sqrt {(x_{B}-x_{A})^{2}+(y_{B}-y_{A})^{2}+(z_{B}-z_{A})^{2}}}}

Góc giữa 2 vecto[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
;
a
3
)
{displaystyle {vec {a}}=(a_{1};a_{2};a_{3})}
và
b
→
=
(
b
1
;
b
2
;
b
3
)
{displaystyle {vec {b}}=(b_{1};b_{2};b_{3})}

α
{displaystyle alpha }
là góc giữa 2 vecto
a
→
{displaystyle {vec {a}}}
và
b
→
{displaystyle {vec {b}}}
. Khi đó
cos
(
α
)
=
a
→
.
b
→
|
a
→
|
|
b
→
|
=
a
1
b
1
+
a
2
b
2
+
a
3
b
3
(
a
1
2
+
a
2
2
+
a
3
2
)
(
b
1
2
+
b
2
2
+
b
3
2
)
{displaystyle cos(alpha )={{vec {a}}.{vec {b}} over leftvert {vec {a}}rightvert leftvert {vec {b}}rightvert }={a_{1}b_{1}+a_{2}b_{2}+a_{3}b_{3} over {sqrt {(a_{1}^{2}+a_{2}^{2}+a_{3}^{2})(b_{1}^{2}+b_{2}^{2}+b_{3}^{2})}}}}

sin
α
=
|
[
a
→
;
b
→
]
|
|
a
→
|
|
b
→
|
{displaystyle sin alpha ={leftvert [{vec {a}};{vec {b}}]rightvert over leftvert {vec {a}}rightvert leftvert {vec {b}}rightvert }}
![{displaystyle sin alpha ={leftvert [{vec {a}};{vec {b}}]rightvert over leftvert {vec {a}}rightvert leftvert {vec {b}}rightvert }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f2910d5b647b60cec16f1fd710404a3c4a9bcb73)
Một số biểu thức tọa độ[sửa|sửa mã nguồn]
Cho
a
→
=
(
a
1
;
a
2
;
a
3
)
{displaystyle {vec {a}}=(a_{1};a_{2};a_{3})}
ta có
k
a
→
=
(
k
a
1
;
k
a
2
;
k
a
3
)
{displaystyle k{vec {a}}=(ka_{1};ka_{2};ka_{3})}

Cho a → = ( a 1 ; a 2 ; a 3 ) { displaystyle { vec { a } } = ( a_ { 1 } ; a_ { 2 } ; a_ { 3 } ) } và b → = ( b 1 ; b 2 ; b 3 ) { displaystyle { vec { b } } = ( b_ { 1 } ; b_ { 2 } ; b_ { 3 } ) } ta có
- a → + b → = ( a 1 + b 1 ; a 2 + b 2 ; a 3 + b 3 ) { displaystyle { vec { a } } + { vec { b } } = ( a_ { 1 } + b_ { 1 } ; a_ { 2 } + b_ { 2 } ; a_ { 3 } + b_ { 3 } ) }
- a → − b → = ( a 1 − b 1 ; a 2 − b 2 ; a 3 − b 3 ) { displaystyle { vec { a } } – { vec { b } } = ( a_ { 1 } – b_ { 1 } ; a_ { 2 } – b_ { 2 } ; a_ { 3 } – b_ { 3 } ) }
- a →. b → = a 1 b 1 + a 2 b 2 + a 3 b 3 { displaystyle { vec { a } }. { vec { b } } = a_ { 1 } b_ { 1 } + a_ { 2 } b_ { 2 } + a_ { 3 } b_ { 3 } }
-
[
a
→,
b
→]
=
(
|
a
2
a
3
b
2
b
3
|
;
|
a
3
a
1
b
3
b
1
|
;
|
a
1
a
2
b
1
b
2
|
)
{displaystyle left[{vec {a}},{vec {b}}right]={big (}{begin{vmatrix}a_{2}&a_{3}\b_{2}&b_{3}end{vmatrix}};{begin{vmatrix}a_{3}&a_{1}\b_{3}&b_{1}end{vmatrix}};{begin{vmatrix}a_{1}&a_{2}\b_{1}&b_{2}end{vmatrix}})}



![{displaystyle left[{vec {a}},{vec {b}}right]={big (}{begin{vmatrix}a_{2}&a_{3}\b_{2}&b_{3}end{vmatrix}};{begin{vmatrix}a_{3}&a_{1}\b_{3}&b_{1}end{vmatrix}};{begin{vmatrix}a_{1}&a_{2}\b_{1}&b_{2}end{vmatrix}})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75c5f379d8c759bec8472dfc1ad67d153e5761d4)
Cho đoạn thẳng AB có
A
(
x
A
;
y
A
;
z
A
)
{displaystyle A(x_{A};y_{A};z_{A})}
và
B
(
x
B
;
y
B
;
z
B
)
{displaystyle B(x_{B};y_{B};z_{B})}
, Khi đó
I
(
x
A
+
x
B
2
;
y
A
+
y
B
2
;
z
A
+
z
B
2
)
{displaystyle Ileft({x_{A}+x_{B} over 2};{y_{A}+y_{B} over 2};{z_{A}+z_{B} over 2}right)}

Cho
△
A
B
C
{displaystyle bigtriangleup ABC}
có
A
(
x
A
;
y
A
;
z
A
)
{displaystyle A(x_{A};y_{A};z_{A})}
,
B
(
x
B
;
y
B
;
z
B
)
{displaystyle B(x_{B};y_{B};z_{B})}
và
C
(
x
C
;
y
C
;
z
C
)
{displaystyle C(x_{C};y_{C};z_{C})}

G
(
x
A
+
x
B
+
x
C
3
;
y
A
+
y
B
+
y
C
3
;
z
A
+
z
B
+
z
C
3
)
{displaystyle Gleft({x_{A}+x_{B}+x_{C} over 3};{y_{A}+y_{B}+y_{C} over 3};{z_{A}+z_{B}+z_{C} over 3}right)}

△
A
B
C
{displaystyle bigtriangleup ABC}
- Sách giáo khoa Toán 7 tập 1
- Sách giáo khoa Hình học lớp 10
- Sách giáo khoa Hình học lớp 10 nâng cao
- Sách giáo khoa Hình học lớp 12
- Sách giáo khoa Hình học lớp 12 nâng cao
